
RESEARCH ARTICLE
Dynamic Modelling of Heart Rate Response Under Different Exercise Intensity
Steven W Su1, 2, 3, Weidong Chen*, 1, Dongdong Liu1, Yi Fang1, Weijun Kuang1, Xiaoxiang Yu1, Tian Guo1, Branko G Celler3, Hung T Nguyen2
Article Information
Identifiers and Pagination:
Year: 2010Volume: 4
First Page: 81
Last Page: 85
Publisher Id: TOMINFOJ-4-81
DOI: 10.2174/1874431101004020081
Article History:
Received Date: 3/10/2009Revision Received Date: 5/11/2009
Acceptance Date: 15/11/2009
Electronic publication date: 28/5/2010
Collection year: 2010
open-access license: This is an open access article licensed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted, non-commercial use, distribution and reproduction in any medium, provided the work is properly cited.
Abstract
Heart rate is one of the major indications of human cardiovascular response to exercises. This study investigates human heart rate response dynamics to moderate exercise. A healthy male subject has been asked to walk on a motorised treadmill under a predefined exercise protocol. ECG, body movements, and oxygen saturation (SpO2) have been reliably monitored and recorded by using non-invasive portable sensors. To reduce heart rate variation caused by the influence of various internal or external factors, the designed step response protocol has been repeated three times. Experimental results show that both steady state gain and time constant of heart rate response are not invariant when walking speed is faster than 3 miles/hour, and time constant of offset exercise is noticeably longer than that of onset exercise.
1. INTRODUCTION
As heart rate can be easily measured by using wireless portable sensors, it has been extensively used to monitor exercise intensity and estimate exercise response of key cardiovascular variables, such as oxygen consumption [1, 2], energy expenditure [3] and cardiac output [4, 5].
The heart rate is a non-stationary signal, and its variation includes indicators of current disease or warnings about impending cardiac diseases [6]. Recently, heart rate has been applied for the assessment of cardiovascular fitness and monitoring of rehabilitation exercise with a focus on cardiovascular abnormality detection [6, 7]. To effectively detect cardiac abnormalities and monitor rehabilitation exercise, an efficient way is to set up models for normal heart rate responses. Then, abnormal response detection can be treated as a fault detection problem. The most commonly used method of fault detection is model based residual analysis [8]. Based on the established models, abnormal responses can be detected by calculating the residual of heart rate response, which can be acquired by comparing the signals, measured by using sensor and estimated by using the model. There are plenty of papers [9, 10] about the analysis of steady state characteristics of heart rate response. Some papers investigate its dynamic characteristics by using linear or nonlinear models [11, 12]. However, few papers investigate the variation of dynamic characteristic (such as time constant) of onsite and offsite walking exercises. For moderate exercise, literatures often assume heart rate dynamics can be described by linear time invariant models. However, in our previous studies, it was observed time constant of heart response to exercise depends on exercise intensity. It is also reported [13-15] that exercise effects can be optimised by regulating heart rate following a predefined exercise protocol. Therefore, it is worthwhile to establish a more accurate dynamical model to enhance the controller design of heart rate regulation. For this purpose, this study investigated the variations of time constant and steady state gain under different exercise intensity. More attention was paid on the difference of transient response of onsite and offset exercises. We designed a treadmill walking exercise protocol to analyse step response of heart rate. During experiments, ECG, body movement, and oxygen saturation were recorded by using portable non-invasive sensors: Alive ECG monitor, Micro Inertial Measurement Unit (IMU), and Alive Pulse Oximeter. It was confirmed that time constant are not invariant, especially when walking speed is faster than 3 miles/hour. Furthermore, time constant for offsite exercise is normally bigger than that of onset exercises. Steady state gain variation under different exercise intensity has also been visibly observed.
This paper is organised as follows. Section 2 describes the experimental equipments and exercise protocol. Data analysis and modelling results are given in Section 3. Finally, Section 4 gives conclusions.
2. EXPERIMENTAL EQUIPMENTS AND EXERCISE PROTOCOL
2.1. Subject
A healthy male joined the study. Physical characteristics of the subject are shown in Table 1.
Subject Characteristics
| Age (yo) | Height (cm) | Body Mass (kg) |
|---|---|---|
| 41 | 178 | 79 |
2.2. Experimental Procedure
Experiments were performed in the afternoon, and the subject was allowed to have a light meal one hour before the measurements. After walked for about 10 minutes on the treadmill to get acquainted with this kind of exercise, the subject walked at six sets of exercise protocol (see Fig. 1) to test step response. The values of walking speed Va and Vb were designed to vary exercise intensity and are listed in Table 2. To properly identify time constants for onset and offset exercises, the recorded data should be precisely synchronised. Therefore, time instants t1, t2, t3, and t4 should be identified and marked accurately. In this study, we applied a Micro Inertial Measurement Unit (Xsens MTi-G IMU) to fulfil this requirement. We compared both attitudes information (roll, pitch, and yaw angles) and acceleration information provided by the Micro IMU. It was observed that acceleration information alone is sufficient to identify these time instants (see Figs, 2, 3).
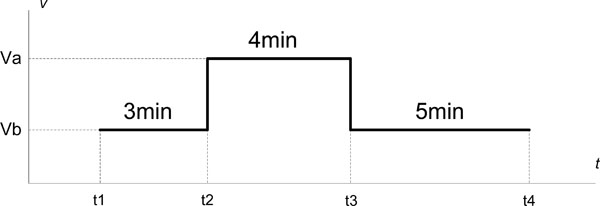 |
Fig. (1). Experiment protocol. |
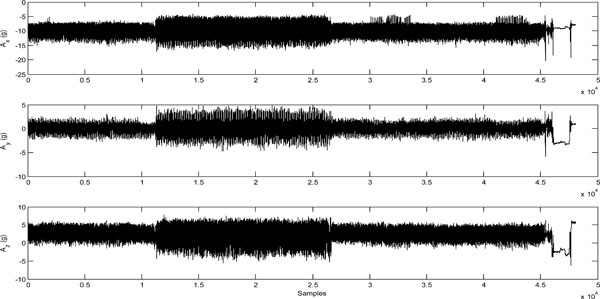 |
Fig. (2). Accelerations of three axes provided by the Micro IMU. |
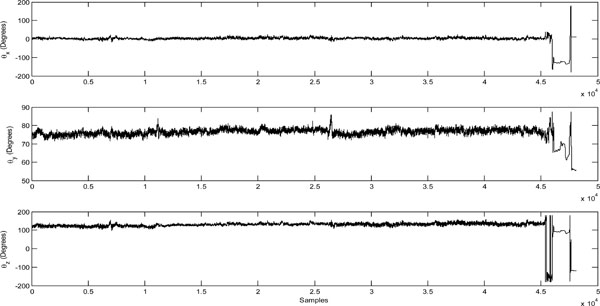 |
Fig. (3). Roll, pitch and yaw angles provided by the Micro IMU. |
The Values of Walking Speed Va and Vb
| Set 1 | Set 2 | Set 3 | Set 4 | Set 5 | Set 6 | |
|---|---|---|---|---|---|---|
| Va (m/h) | 0.5 | 1.5 | 2 | 2.5 | 3 | 3.5 |
| Vb (m/h) | 1.5 | 2.5 | 3 | 3.5 | 4 | 4.5 |
During experiments, continuous measurements of ECG, body movement, and SpO2 (oxygen saturation) were made by using portable non-invasive sensors. Specifically, ECG was recorded by using Alive ECG Monitor. Body movement was measured by using the Xsens MTi-G IMU. SpO2 was monitored by using Alive Pulse Oximeter to guarantee the safety of the subject. The experimental scenario is shown in Fig. (4).
 |
Fig. (4). Experimental scenario. |
3. DATA ANALYSIS AND DISCUSSIONS
Original signals of IMU, ECG, and SpO2 are shown in Figs. (3, 5, 6), respectively. It is well known that even in the absence of external interference the heart rate can vary substantially over time under the influence of various internal or external factors [13]. As mentioned before, in order to reduce the variance, designed experimental protocol has been repeated three times. Experimental data of these repeated experiments has been synchronised and averaged.
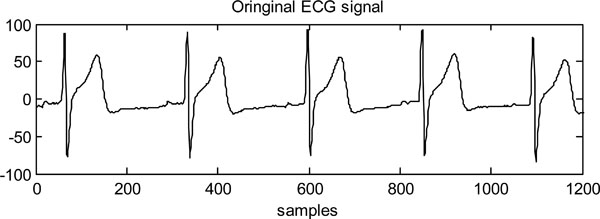 |
Fig. (5). Original ECG signal. |
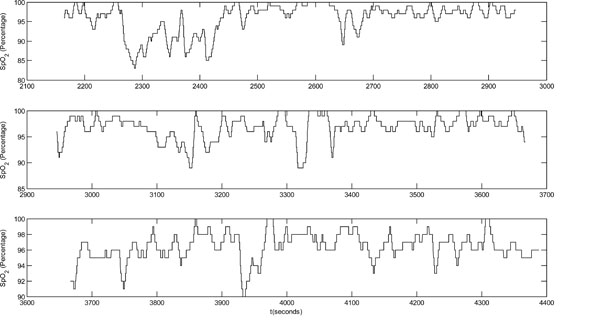 |
Fig. (6). The recording of SpO2. |
A typical measured heart rate response is shown in Fig. (7). Paper [13] found that heart rate response to exercise can be approximated as first order process from a control application point of view. Therefore, we established first order model for six averaged step response data by using Matlab System Identification Toolbox [16]. The identified time constants and steady state gain are shown in Table 3. Curve fitting results of all six cases are shown in Fig. (8).
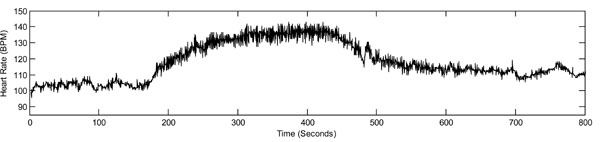 |
Fig. (7). A measured heart rate step response signal. |
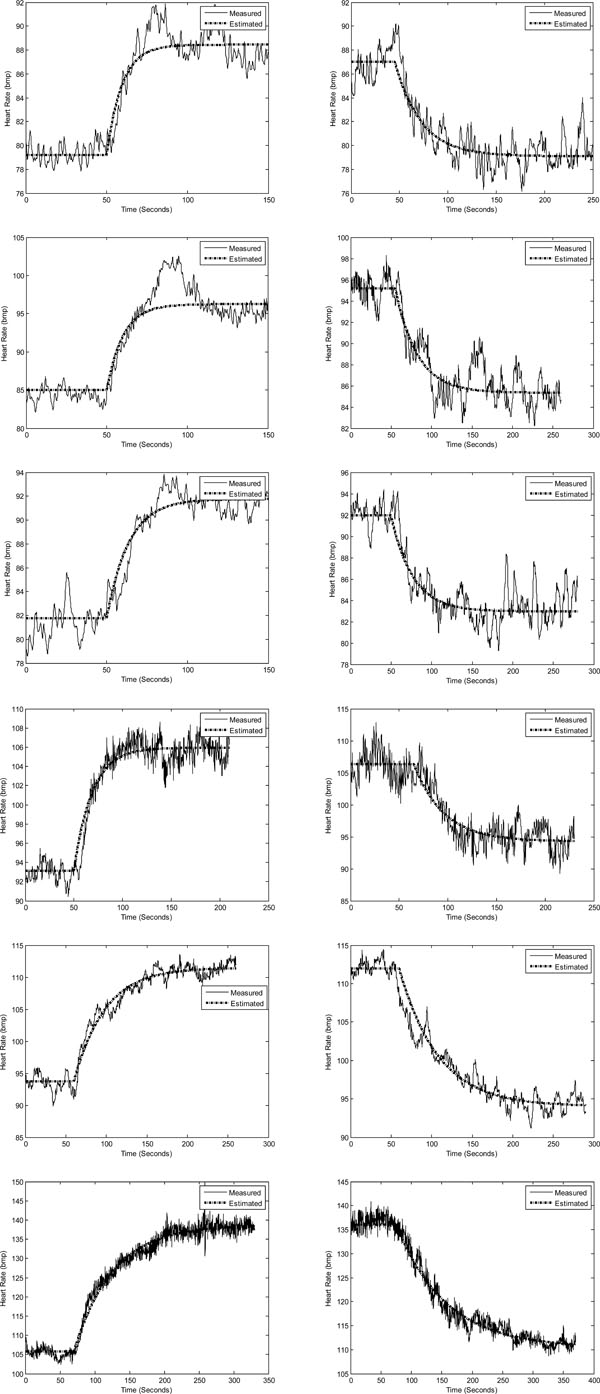 |
Fig. (8). Curve fiting results for onset and offset exercises for all six exercise intensities as listed in Table 3. |
Summary of the Identified Time Constants and Steady State Gains
| Exercise Scenarios | Treadmill Speed (mph) | Onsite Exercise | Offsite Exercise | ||
|---|---|---|---|---|---|
| Steady State Gain (k1) (bpm/mph) | Time Constant (T1) (Seconds) | Steady State Gain (k2) (bpm/mph) | Time Constant (T2) (Seconds) | ||
| 1 | Va=0.5; Vb=1.5 | 9.2583 | 9.4818 | 7.9297 | 27.358 |
| 2 | Va=1.5; Vb=2.5 | 11.264 | 10.193 | 9.8561 | 27.365 |
| 3 | Va=2.0; Vb=3.0 | 10.006 | 13.659 | 8.9772 | 26.741 |
| 4 | Va=2.5; Vb=3.5 | 12.807 | 18.618 | 12.087 | 30.865 |
| 5 | Va=3.0; Vb=4.0 | 17.753 | 38.192 | 17.953 | 48.114 |
| 6 | Va=3.5; Vb=4.5 | 32.911 | 55.974 | 25.733 | 81.693 |
Based on the identified steady state gain (k) and time constant (T) as listed in Table 3, we can clearly see that both steady state gain and time constant vary when walking speed Va and Vb change. Furthermore, time constant of offsite exercise are noticeably bigger than those of onsite exercises. However, it should be pointed out that the variant of time constant is not distinctly dependent on walking speed when walking speed is less than 3 miles/hour. Overall, experimental results indicate that heart rate dynamics at onsite and offset exercise exhibited highly nonlinearity when walking speed is higher than 3 miles/hour.
4. CONCLUSION
This study mainly focuses on the analysis of dynamic nonlinear behaviour of heart rate response to treadmill walking exercises. Both steady state gain and time constant under different walking speeds have been identified and analysed by using the data from a healthy middle aged male subject. It was observed that both steady state gain and time constant are not invariant under different walking speeds. Especially, time constant for recovery stage is noticeably longer than that of onsite exercise. In order to verify this conclusion, we are planing to recruit more subjects in the next step of this study. Nonlinear control algorithm will also be developed for the established exercise intensity dependent nonlinear model. We believe that this study has great potential to improve exercise efficiency during treadmill exercises.
ACKNOWLEDGEMENTS
This work is partly supported by the National High-Tech R&D Program of China under grant 2006AA040203.
